仪表与仪表智能化
日期: 2019-01-03
仪器仪表是人类认识世界的工具,人们借助于各种仪器仪表对各种物理量进行度量,反映其大小与变化规律. 随着人类认识能力的提高与科学技术不断进步,仪器仪表技术得到了飞速发展.50 年代以前,仪器仪表多为指针式,其理论基础是机电学. 从50 年代起,电子技术特别是数字技术的发展,给仪表行业带来了生机,各种数字式仪表相继问世,许多传统的指针式仪表相继被淘汰,数字仪表使仪表外观耳目一新,数据表达能力与总体性能都大幅提高. 70 年代中期,随着微处理器的出现以及单片机的兴起与应用,设计者将计算机特有的许多优点引入仪表设计,随之产生了一代崭新的智能仪表,使仪表逐渐由数字型向智能化发展,其功能也由单一显示功能转变为具有信息处理、传输、存贮、显示、控制等功能,使仪表性能产生了质的飞跃.仪器仪表产品技术密集,品种繁多. 目前,我国仪器仪表有13 大类,1 300 多个产品. 其中自动化仪表及控制系统是和国民经济各产业部门关系最为密切的一类产品,其传感变送单元与主控装置及I/ O接口均正朝智能化方向发展.
1. 仪表智能化的技术基础
1. 1 智能仪表的实质
智能仪表将计算机科学中有关信息存贮、数字计算、非数值处理、数据通信引入到仪表设计中来,使仪表具有“记忆”人的思维活动的功能. 智能仪表与常规仪表相比具备如下特点:
1) 可用数字或图形直观表示测量结果;
2) 可用键盘或拨码开关设置仪表的状态参数与工作参数;
3) 具有数据存贮与数据处理能力;
4) 能与多种外部设备配接,组成智能化的测控系统;
5) 具有较高的测量精度;
6) 能以编程方式确定仪表工作过程.
1) 可用数字或图形直观表示测量结果;
2) 可用键盘或拨码开关设置仪表的状态参数与工作参数;
3) 具有数据存贮与数据处理能力;
4) 能与多种外部设备配接,组成智能化的测控系统;
5) 具有较高的测量精度;
6) 能以编程方式确定仪表工作过程.
1. 2 智能仪表的组成
以单片机为核心的智能仪表的组成包括硬件与软件两部分.
2. 1. 1 离子风静电消除器
1) 硬件组成. 智能仪表的硬件方框图如图1所示.

其核心是单片机. 智能仪表内部为数字,而与其交往的外部为模拟,两者之间通过A/ D、D/ A 器件作为交换界面. 被测量经过传感变送单元,经智能仪表进行数据采集与处理后输出,经D/A 器件转换成模拟量进行记录,或输出控制模拟机构;或在CRT 上显示,实现智能仪表的基本功能.计算机接口技术的不断发展以及接口标准的不断完善,为智能仪表的功能扩展提供了广阔的舞台.
GPIB( IEEE - 486) 标准总线接口具有一口多接、高 级性、价格便宜等特点,在智能仪表开发应用方面已十分广泛. 通过它能将智能仪表与具有相同接口的设备(如打印机、绘图仪、磁盘驱动器等) 、计算机系统经简单连接,很快组成自动测控系统,RS - 232 -C 串行接口的应用,使智能仪表采集或处理后的数据远传成为可能.
GPIB( IEEE - 486) 标准总线接口具有一口多接、高 级性、价格便宜等特点,在智能仪表开发应用方面已十分广泛. 通过它能将智能仪表与具有相同接口的设备(如打印机、绘图仪、磁盘驱动器等) 、计算机系统经简单连接,很快组成自动测控系统,RS - 232 -C 串行接口的应用,使智能仪表采集或处理后的数据远传成为可能.
2) 软件. 智能仪表的软件包括主机系统监控
程序(系统软件) 与应用程序. 系统软件负责系统的协调运行、仪表的故障诊断,设计人员根据仪表的功能要求编制相应的应用程序,由主机系统完成运行,从而赋予仪表各种智能.
2. 智能化仪表的功能
智能仪表的智能由仪表的各种功能反映出来,具体表现如下.
2. 1 信号预处理
被测物理量由模拟量输入通道经A/ D 转换器送入计算机的信息为代表被测参数的二进制数字量,对这些数字量必须经过相应的预处理方能进行相关运算处理,这些预处理包括标度变换、零点和增益自动校准.
1) 标度变换.
A/ D 转换器输出的二进制代码,不能直接输出显示打印,把A/ D 转换器输出的数字量转换为具有一定工程单位的数字量的过程称为标度变换. 其形式取决于被测量所用传感器或变送器的类型.
①线性变换法. 当被测量与A/ D 输出值之间呈线性关系时,变换公式为
Y =
Ymax - Ymin
Nmax - Nmin
( X - Nmin) + Ymin
式中 Y :标度变换后被测量实测值;
Ymax 、Ymin :表示量程上、下限;
Nmax 、Nmin :表示对应Ymax 、Ymin的A/ D 输出值;
X :对应Y 的A/ D 输出值.
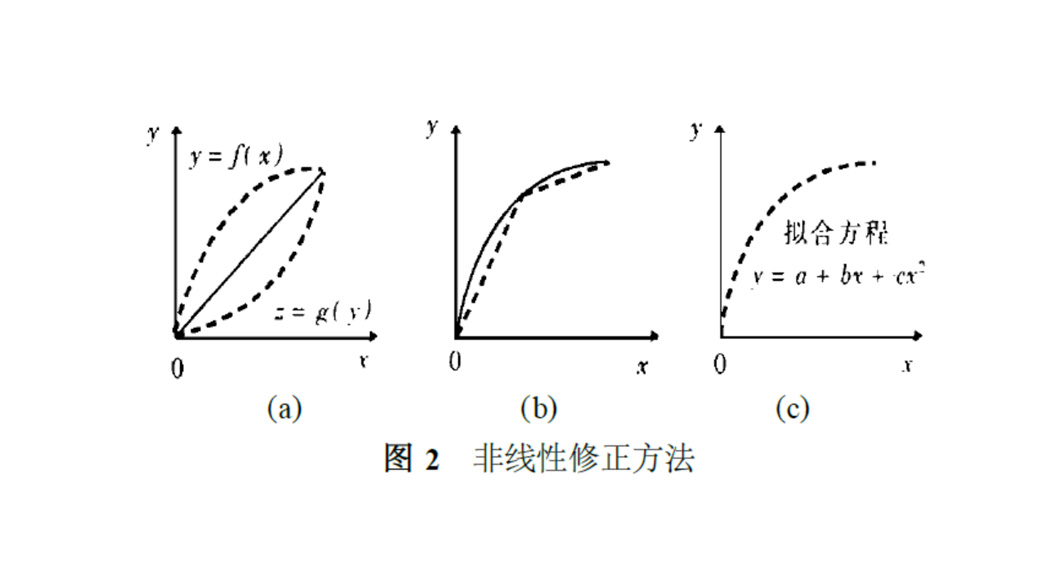
②非线性修正法. 当被测量与A/ D 输出值之间存在明显的非线性特性时,需要对A/ D 输出值进行线性修正.如图2 (a) 所示, y = f ( x ) 为一非线性函数, 则令z = g ( y) = g[ f ( x ) ]为其修正函数,经过计算完成线性修正. 此外, 利用折线代替曲线, 或使用最小二乘法求出曲线的拟合方程, 经过运算均能在一定的精度范围内,完成线性校正,如图2 (b) 、图2 (c) 所示.
①线性变换法. 当被测量与A/ D 输出值之间呈线性关系时,变换公式为
Y =
Ymax - Ymin
Nmax - Nmin
( X - Nmin) + Ymin
式中 Y :标度变换后被测量实测值;
Ymax 、Ymin :表示量程上、下限;
Nmax 、Nmin :表示对应Ymax 、Ymin的A/ D 输出值;
X :对应Y 的A/ D 输出值.
②非线性修正法. 当被测量与A/ D 输出值之间存在明显的非线性特性时,需要对A/ D 输出值进行线性修正.如图2 (a) 所示, y = f ( x ) 为一非线性函数, 则令z = g ( y) = g[ f ( x ) ]为其修正函数,经过计算完成线性修正. 此外, 利用折线代替曲线, 或使用最小二乘法求出曲线的拟合方程, 经过运算均能在一定的精度范围内,完成线性校正,如图2 (b) 、图2 (c) 所示.
在校正函数与拟合方程不易获得的情况下,应用查表法对测量结果进行修正,也是智能仪表里常用的一种简便实用的方法. 测量过程中把修正值存入EPROM ,把A/ D 转换的输出值不作为测量的直接结果,而作为EPROM 的地址,A/ D 转换的结束标志作为读取EPROM 的读取信号,读取对应地址单元所保存的修正值,测量值是A/ D 输出值与修正值之和.
2) 零点和增益自动校准.
零点和增益稳定是影响仪表精度的重要因素. 为了提高测量的精度,除了在通道本身采取一定措施外,常常在计算机内部对这些误差进行进一步校准. 图5 是校准方框图.

进入测量周期前,计算机发出零点校准指令使多路开关输出端V i = 0. 这时A/ D 输出值为X0 ,再发增益校准指令使多路开发输出端V i = VR ,A/ D输出值为XR ,设放大器增益准确时A/ D 输出值为XR′. 引入增益修正系数K = ( XR′- X0 ) / ( XR -X0) 后对通道零点和增益进行了校准.校准可在测量周期前进行,也可在计算机控制下定期进行.
2. 2 数字滤波
仪表输入通道受到外界的干扰,使采样的信息含有虚假信息,为了进行准确的测量和可靠控制,必须设法抑制或消除干扰的影响. 智能仪表中除了硬件采取抗干扰措施外, 对采样的数据进行数字滤波是行之有效的方法,它具有以下的优点:
1) 数字滤波用程序实现,不需增加硬件设备,不存在阻抗匹配的问题,提高了稳定性与可靠性;
2) 可以对抵频信号滤波, 避免了模拟滤波器受电容容量的影响;
3) 滤波方法或滤波参数设置灵活. 根据信号的特点及测量精度的要求,可选择不同的方法,常用的有程序判断滤波、中值滤波、滑动平均值滤波、防脉冲干扰平均值滤波、一阶滞后滤波等方法.
1) 数字滤波用程序实现,不需增加硬件设备,不存在阻抗匹配的问题,提高了稳定性与可靠性;
2) 可以对抵频信号滤波, 避免了模拟滤波器受电容容量的影响;
3) 滤波方法或滤波参数设置灵活. 根据信号的特点及测量精度的要求,可选择不同的方法,常用的有程序判断滤波、中值滤波、滑动平均值滤波、防脉冲干扰平均值滤波、一阶滞后滤波等方法.
2. 3 自动量程切换
在智能仪表中,通过硬件和软件的密切配合来实现这种功能. 硬件由衰减器、输入放大器、倍乘器构成,控制软件判断输入信号的大小,决定对其衰减或倍乘关系,自动实现量程切换.
2. 4 自动功能选择
智能仪表面板上的各个按键可以灵活的定义各种功能操作和参数设定, 或者通过允许用编程方式选择功能键,自动完成一系列的测量、运算处理、控制等操作.
2. 5 自动数据处理
能自动进行数据处理是智能仪表的一大特点,除前面所述对测量值的各种预处理、滤波及修正外,常用的各种数据处理方法包括:
1) 按线性关系、对数关系或乘方关系求测量值相对于基准值的比值, 求测量值相对于基准值的百分比偏差, 求测量值的最 大值、最 小值和峰一峰值;
2) 根据制品的公差带,判断其合格性;
3) 各种分析计算、统计分析;
4) 完成各种单位制的换算.
1) 按线性关系、对数关系或乘方关系求测量值相对于基准值的比值, 求测量值相对于基准值的百分比偏差, 求测量值的最 大值、最 小值和峰一峰值;
2) 根据制品的公差带,判断其合格性;
3) 各种分析计算、统计分析;
4) 完成各种单位制的换算.
2. 6 控制功能
生产过程控制系统中,现场被控对象的动态特性及影响因素各不相同, 要设计出品质与稳定性符合控制要求的控制系统,必须采用合适的系统结构、合理的控制规律和正确的控制参数. 计算机的应用,使控制仪表控制策略的实施成为可能.现代控制技术提供了多种控制手段,微处理器的应用,各种控制算法的程序算法应运而生. 优质控制理论可以证明, PID 的位置、增量、速度控制算法能满足相当多的工业对象的控制要求,对PID 算法积分饱和问题可以通过不完全微分、微分先行、积分限幅、带死区、限制给定值上升速度等方法来克服.当被控对象有大纯滞后时,回路中采用带Smith 预估的PID 算法或采用Dahlin 控制器来解决.
2. 7 自动故障诊断
智能仪表及由相关智能仪表所构成的测控系统常备有自检程序,采用查询、对比、模拟、注人信号、断点设置、逻辑分析等方法可以对仪表内的插件板或功能板进行检查,它不仅能指示仪器的工作是否正常,而且能指示发生故障的部位并提供维护措施及解决方法,使仪表工作的可靠性和用户对仪表的信赖程度大为增强.
2. 8 应用开放性
大型测控系统中,各种测控功能的实现,要求对生产过程的实时信息存取. 现场智能仪表在内部处理功能和性能上均有了很大提高,而且采用了双向数字通讯技术,使其与控制系统能相互通信,这种信息传输技术的应用,使智能仪表的应用具有对外开放性,现场总线(Field Bos) 技术的应用,各种智能变送器已经开始广泛使用. 符合通信协议的智能仪表联结在通信网络上,实现智能仪表与测控系统双向数据通信,现场智能仪表向测控系统传送过程信息,测控系统向现场智能仪表远程传送组态、标定和诊断信息,为运行管理提供了极大的方便.
3. 结论
智能仪表的功能远不止这些,仪表智能化是仪表的发展方向,随着技术的进步与仪表开发的深入,各种功能的测控智能仪表将应用到生产工程实践中来,各行各业对工业自动化仪表及智能测控仪表在质量上与数量上表现出很大的需求,如何提高我国现场仪表智能化水平是摆在广大仪表开发人员面前的重大课题.
 备案号:沪ICP备18025528号-1
备案号:沪ICP备18025528号-1